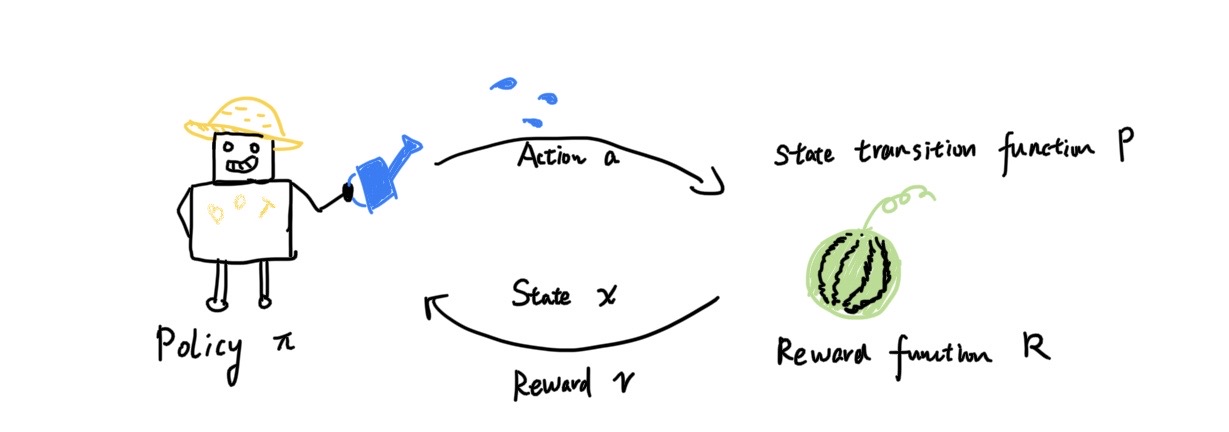
强化学习在“机器”与“环境”的交互中完成。机器对环境采取一个动作(Action),环境状态(State)会相应作出改变;环境状态的变化对应了一个奖励(Reward),来反馈给机器。强化学习要解决的问题就是:为机器找到一个最优的策略(Policy),这个策略对应的动作序列使得长期累积的奖赏最大。
监督学习:样本已标记;样本独立(IID,独立同分布)
强化学习:延迟标记(奖励);样本通常是序列
序列决策(Sequential Decision Making)
选择一个动作序列,使得这个动作序列获得总的奖励最大。奖励可能是即时的,也可能是延迟获得的。
History:由观测、动作、奖励构成的序列
State:History决定了当前状态,用来决策下面的动作。
环境状态和机器状态
Policy
Deterministic
Stochastic
第二章 马尔可夫决策过程(MDP)
1. 马尔可夫链、马尔可夫奖励过程、马尔可夫决策过程
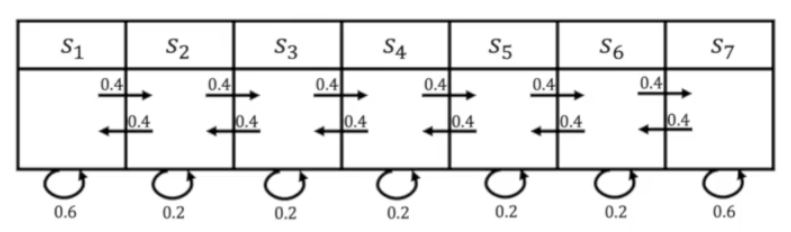
1.1 马尔可夫链(Markov Chain)
下一时刻的状态只取决于当前时刻的状态,而与过去的历史状态无关,称为马尔可夫特征。 具有马尔可夫特征的一系列状态构成一条马尔可夫链。
1.2 马尔可夫奖励过程(Markov Reward Process)
对不同的状态s设定奖励R(s),就形成了对某些状态的偏好。
给定一条马尔可夫链,从某一时刻t开始,到最大时步T结束,得到的总奖励值称为回报(Return)或累积奖励。常用的累积奖励形式有
某一状态s在t时刻的价值函数(value function)是t时刻从该状态出发得到回报的期望
定义了价值函数,我们的目标就具象了起来:想要更多的回报,就要令价值函数越大越好。
价值函数的计算有两种方法:
Monte Carlo采样(采样得到足够多的马尔可夫链样本,计算回报的期望)
Bellman Equation(迭代式)
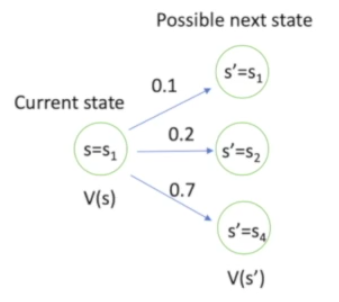
这里面的$P(s’|s)$是状态转移函数,含义是从当前状态s向下一个状态s‘转移的概率。
假设马尔可夫链无限长,即终止时间T无限大,则$V(s)=V(s’)$,Bellman equation可以写成矩阵形式
解析解为$V=(I-\gamma P)^{-1}R$,实际求解方法有Dynamic Programming、Monte-Carlo、Temporal-Difference learning等。
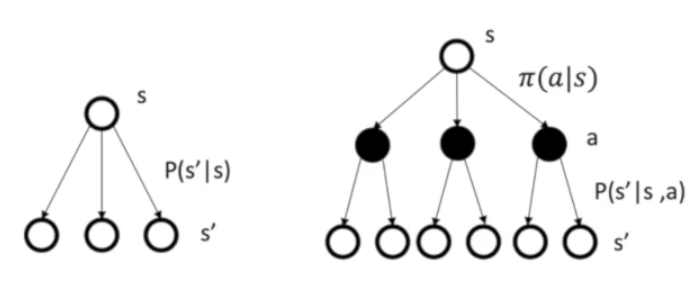
1.3 马尔可夫决策过程(Markov Decision Process)
与马尔可夫奖励过程相比,马尔可夫决策过程从当前状态向下一状态的转移由动作(Action)决定。加入动作之后,MRP中状态的奖励$R(s)$在MDP里变为$R(s,a)$。这种说法其实并不严谨,当前状态的奖励怎么会除了状态本身相关,还受下一步要采取的动作影响呢?下面会解释它们之间细微的差别。
我们制定一个策略(Policy)来决定一系列动作
如果策略确定,马尔可夫决策问题就可以转化为马尔可夫奖励问题
其中$P(s’|s,a)$是转移函数(Transition function)。根据2式我们可以体会到,为什么$R(s,a)$的定义是不自然的:它是为了引入动作(确切地说是策略$\pi(a|s)$)而构造出的一个定义,可以理解为把状态s的奖励按概率$\pi(a|s)$掰开得到的一个量。
确定策略的MDP问题已经退化为MRP问题,则可以定义类似的状态值函数(state-value function)
写出Bell equation
我们新定义一个动作-状态值函数(action-value function)$q^{\pi}(s,a)$,令
类似地,$q^{\pi}(s,a)$是把状态值函数$V^{\pi}(s)$按动作概率$\pi(a|s)$掰开得到的,它的含义是在状态s采取动作a,之后的策略仍然确定,所能获得的回报的期望。
2. 策略评估
之前提到,定义了价值函数让我们的目标具象了起来,强化学习是一个MDP过程,令价值函数最大,理论上就能得到一个最优的策略。所以,给定一个策略$\pi$,计算该策略下的价值函数$V^{\pi}$,$V^{\pi}$的大小可以反映策略$\pi$的优劣。这个过程叫策略评估(Policy evaluation)。
计算价值函数的方法我们前面也有提及,最常用的做法是利用Bellman Equation迭代至收敛
这实际上就是一种动态规划算法,从$t_0$时刻出发,迭代一次得到单步奖赏$V^{\pi}_{t_1}$,继续迭代得到$V^{\pi}_{t_2},V^{\pi}_{t_3}…$,直至收敛就得到各个状态的价值函数$V^{\pi}$。这里迭代至收敛是对应$\gamma$折扣累积奖励而言的,如果是T步累积奖励则只需迭代T轮。
3. 马尔可夫决策控制
现在我们知道了怎么计算单个策略对应的价值函数(策略评估),下一步就是在众多策略中找到价值函数最大的那个(最优策略)。这一步叫马尔可夫决策控制(MDP control)。
一个最简单粗暴的方法就是穷举,把所有可能的策略都试一遍。或者写出价值函数的解析解形式,$V^{\pi}$是状态和策略的函数,理论上可以令价值函数最大求解。但这两种思路实际几乎不可操做,下面介绍更可行的方法。
3.1 策略迭代(Policy Iteration)
策略迭代使用贪心算法找最优策略。先给定一个初始策略$\pi_0$,计算价值函数$V^{\pi_0}$;下一个动作选择当前状态下的最优动作——即令动作-状态值函数$q^{\pi_0}(s,a)$最大;这样得到了新的策略$\pi_1=\underset{a}{\arg\max}\ q^{\pi_0}(s,a)$,再计算价值函数$V^{\pi_1}$,…迭代直至收敛。(注意这里使用的是deterministic policy)
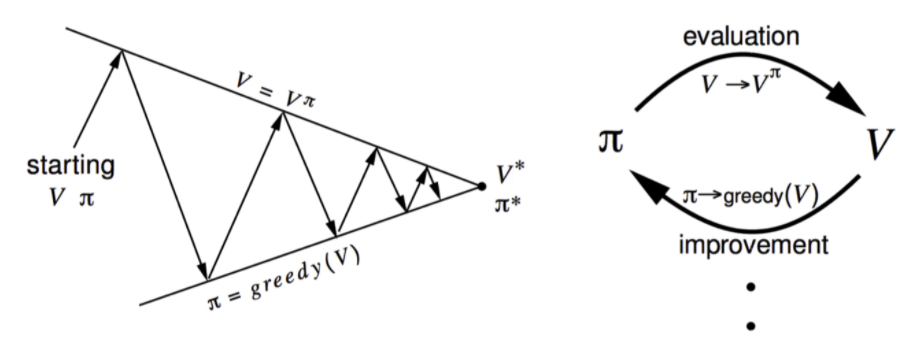
可以证明,这种贪心迭代的过程中价值函数是单调递增的,因为
这样最终迭代收敛得到的
就是最大价值函数和最优策略。
3.2 价值迭代(Value Iteration)
在策略迭代中,令动作-状态值函数最大来改进策略的过程
其实与改进值函数是一致的,因为我们选择determinist policy,所以值函数
既然是一致的,我们就可以直接对值函数迭代,省去策略迭代里每次策略更新后都要进行的策略评估过程。用Bellman optimality equation
迭代值函数至收敛,然后重构出最佳策略
参考